|
Herausforderung
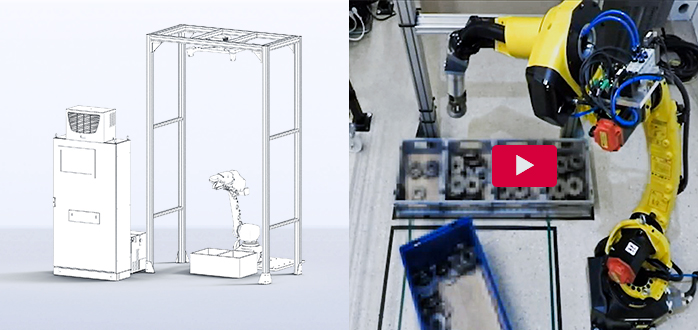
Oft werden Werkstücke oder Komponenten chaotisch zur Kommissionierung bereitgestellt. Die automatisierte, robotergestützte Kommissionierung dieser Teile wird als Bin Picking (Griff in die Kiste) bezeichnet.
Wo heute noch mühsam Werkstücke und Bauteile von Hand umgesetzt und per Rollwagen an Maschinen oder Montageplätzen bereit gestellt werden, sollen Serviceroboter künftig rund um die Uhr flexibel, rückverfolgbar und hocheffizient für Nachschub sorgen. Hierzu werden sensible, intelligente Lösungen benötigt.
Die Erkennung der abzugreifenden Teile erfolgt über Bildverarbeitungsmodule und Sensoren. Die Zusammenarbeit zwischen Roboter, Sensoren, Komponenten und Steuerung ist der entscheidende Erfolgsfaktor.
Vom Testlauf zum produktiven Einsatz
|
|
|
|
Ein sicher funktionierendes „Griff in die Kiste”-Verfahren ist für viele Produktionsunternehmen die ideale Lösung zur Produktionssteigerung, Arbeitserleichterung und Lärmminderung.
TECHTORY beschäftigt sich in seiner modernen Entwicklungsabteilung schon seit längerem mit der roboterbasierten Vereinzelung chaotisch bereitgestellter Objekte.
|
|
Nach erfolgreicher Testphase folgt nun der Einsatz im produktiven Umfeld
Nachdem in der Testphase verschiedenste Bauteile, Lichtverhältnisse, Sortieroptionen und Alternativ-Griffe zum Erreichen der 100%igen Entleerung einer Kiste erfolgreich getestet wurden, folgt nun der produktive Einsatz.
In Zusammenarbeit mit einem global agierenden Automobilzulieferer wird aktuell eine „Griff in die Kiste Anlage” in Betrieb genommen. Diese wird in Kürze an das Produktionswerk ausgeliefert.
Sichere Funktionsweise - 100%ige Entleerung
Intensive Weiterentwicklung hat zu einem Ergebnis geführt, das viele Betriebe überzeugen wird. Das System besticht durch integrierte Kollisionsberechnungen, wodurch der Roboter in der Lage ist, seinen Raum in und um die Kiste optimal zu nutzen und sämtliche Teile sicher zu greifen sowie durch zahlreiche weitere Vorteile:
|
| |
▪ |
Hohe Flexibilität durch CAD-Referenzobjekte |
▪ |
Schneller Produktwechsel |
▪ |
Nahezu unempfindlich gegen Tageslicht |
▪ |
Integrierte Kollisionsberechnung des kompletten Roboters |
▪ |
Integrierte Medienführung bis zum Schultergelenk des Roboters |
▪ |
100%ige Entleerung der Kisten |
▪ |
Alternative Griffe zur Optimierung der Greifpositionen bei Nicht-Erreichbarkeit |
▪ |
Vorsortierung durch Auswertung der Greifposition |
▪ |
Nachberechnung mittels stationärer 2D- oder 3D-Kamera zur lagerichtigen Weitergabe an die nachgelagerte Produktionsmaschine |
|
|
Effiziente Automatisierungslösungen – kurze Entwicklungs- und Inbetriebnahmezeiten
Für eine hochproduktive Automatisierung Ihrer Herstellungsprozesse entwickeln wir individuelle Lösungen. Der Einsatz von standardisierten Komponenten und Softwarebausteinen sowie eine Vorinbetriebnahme in unserem Haus sorgen für eine schnelle Einbindung in Ihren Betriebsablauf. |
|
|
|
Nach erfolgreicher Testphase folgt nun der Einsatz im produktiven Umfeld
Nachdem in der Testphase verschiedenste Bauteile, Lichtverhältnisse, Sortieroptionen und Alternativ-Griffe zum Erreichen der 100%igen Entleerung einer Kiste erfolgreich getestet wurden, folgt nun der produktive Einsatz.
In Zusammenarbeit mit einem global agierenden Automobilzulieferer wird aktuell eine „Griff in die Kiste Anlage” in Betrieb genommen. Diese wird in Kürze an das Produktionswerk ausgeliefert.
Sichere Funktionsweise - 100%ige Entleerung
Intensive Weiterentwicklung hat zu einem Ergebnis geführt, das viele Betriebe überzeugen wird. Das System besticht durch integrierte Kollisionsberechnungen, wodurch der Roboter in der Lage ist, seinen Raum in und um die Kiste optimal zu nutzen und sämtliche Teile sicher zu greifen sowie durch zahlreiche weitere Vorteile:
|
| |
▪ |
Hohe Flexibilität durch CAD-Referenzobjekte |
▪ |
Schneller Produktwechsel |
▪ |
Nahezu unempfindlich gegen Tageslicht |
▪ |
Integrierte Kollisionsberechnung des kompletten Roboters |
▪ |
Integrierte Medienführung bis zum Schultergelenk des Roboters |
▪ |
100%ige Entleerung der Kisten |
▪ |
Alternative Griffe zur Optimierung der Greifpositionen bei Nicht-Erreichbarkeit |
▪ |
Vorsortierung durch Auswertung der Greifposition |
▪ |
Nachberechnung mittels stationärer 2D- oder 3D-Kamera zur lagerichtigen Weitergabe an die nachgelagerte Produktionsmaschine |
|
|
Effiziente Automatisierungslösungen – kurze Entwicklungs- und Inbetriebnahmezeiten
Für eine hochproduktive Automatisierung Ihrer Herstellungsprozesse entwickeln wir individuelle Lösungen. Der Einsatz von standardisierten Komponenten und Softwarebausteinen sowie eine Vorinbetriebnahme in unserem Haus sorgen für eine schnelle Einbindung in Ihren Betriebsablauf. |
|